| MODELL-U-BOOTE.de |
|
Wie taucht ein U-Boot?
Es gibt zwei grundsätzliche Verfahren, mit denen es möglich ist, ein U-Boot tauchen und auch wieder auftauchen zu lassen. Aber der Reihe nach. Klären wir doch erst einmal die Frage, wieso ein U-Boot an der Wasseroberfläche schwimmen kann. Und die nennt sich Auftriebskraft. Wenn unser U-Boot in das Wasser eintaucht, dann wird eine bestimmte Menge davon beiseite gedrängt oder auch verdrängt. Das Wasser, das nun seinen ursprünglichen Platz unbedingt wieder einnehmen möchte, drückt jetzt gegen das Boot. Die Kraft, mit der es das macht, ist die Auftriebskraft. Sie ergibt sich aus dem Wasservolumen, das vom Boot verdrängt wird, der Wasserdichte (die bei 1 g/cm3 liegt bzw. etwas darüber) und natürlich auch der Schwerkraft. Gewichtskraft = Auftriebskraft => Boot schwimmt oder schwebt Und wie taucht ein U-Boot jetzt? Ganz einfach, indem sein Gewicht (Gewichtskraft) erhöht oder die Verdrängung (Auftriebskraft) gesenkt wird. Und das kann man z.B. mit Hilfe einer Wasserpumpe machen, die Wasser in einen Tank im Boot pumpt. Dadurch wird das Boot schwerer und schwerer, gleichzeitig wird natürlich auch die Verdrängung größer und größer, weil mit zunehmendem Gewicht das Boot auch zunehmend tiefer einsinkt. Irgendwann ist es jedoch komplett eingetaucht, so dass es bei weiterem Einpumpen keine weitere Verdrängung mehr erzeugen kann. An diesem Punkt schwebt das Boot im Wasser. Gewichtskraft und Auftriebskraft sind immer noch gleich wie auch während der gesamten Zeit des bisherigen Eintauchvorganges. Sobald aber auch nur ein einziger Tropfen Wasser zusätzlich in den Tank gepumpt wird, ist das Gleichgewicht von Gewichtskraft und Auftriebskraft gestört. Unser Boot sinkt - wenn auch nur langsam wegen des sehr geringen Ungleichgewichts - unaufhörlich in die Tiefe. Man nennt dieses Tauchen durch reine Gewichts- oder Auftriebsveränderung auch statisches Tauchen. Zum Schweben würden wir den Wassertropfen wieder herauspumpen und zum Auftauchen würden wir weiteres Wasser aus dem Tank entfernen. Hat der Käpt'n sein U-Boot erst einmal aufs Schweben eingestellt, dann kann er jedes beliebige Ziel unter Wasser mit dem Tiefen- und dem Seitenruder ansteuern. Mit dem Tiefenruder lenkt er sein Boot nach oben oder unten und mit dem Seitenruder nach rechts oder links. Es gibt auch eine andere Methode zu tauchen. Sie kommt ohne die aufwändige Technik eines Tauchsystems aus und wird daher vor allem bei Modell-U-Booten der unteren Preisklassen verwendet. Der Bereich des U-Bootes, der aufgetaucht aus dem Wasser schaut, wird als Reserve- oder Restverdrängung bezeichnet. Bei der jetzt vorgestellten Tauchmethode wird die Reserveverdrängung des U-Boots von vorneherein sehr niedrig eingestellt, so dass meistens nur der Turm aus dem Wasser ragt. Die Wasseroberfläche liegt folglich etwa gleich auf mit dem Deck (s. Bild 2.2). Die niedrige Reserveverdrängung führt dazu, dass der Auftriebskraftüberschuss im getauchten Zustand nur klein ist und hat den Vorteil, dass sich das Boot ziemlich leicht unter Wasser drücken lässt. Jetzt ist es möglich, mit Hilfe des Tiefenruders das Boot tauchen zu lassen. Bild 2.2  Unser Boot ist komplett aufgetaucht. Damit es allein mit dem Tiefenruder getaucht werden kann, wurde es gewichts- bzw. verdrängungsseitig so eingestellt, dass praktisch nur sein Turm aus dem Wasser ragt Da ein Ruder nur funktioniert, wenn es angeströmt wird, muss das U-Boot gleichzeitig Fahrt machen. Nur aufgrund der geringen Reserveverdrängung kann nun mit Hilfe von Motor und Tiefenruder der Auftriebskraftüberschuss des U-Bootes überwunden werden. Solange es in Fahrt bleibt, kann es genauso wie ein statisch tauchendes U-Boot jedes beliebige Ziel unter Wasser ansteuern. Sobald der Antrieb aber abgestellt wird, treibt es selbstständig wieder an die Wasseroberfläche zurück. Diese Art des Tauchens wird als dynamisches Tauchen bezeichnet. Auf dem folgenden Bild 2.3 sehen wir die verschiedenen Ruderlagen bei einem abtauchenden U-Boot. Dabei spielt es keine Rolle, ob dieses Boot ein statischer oder dynamischer Typ ist - hier geht es nur um die Ruderstellungen beim Tauchen mit dem Tiefenruder. Das hier gewählte U-Boot hat nicht nur hinten ein Tiefenruder (sogenanntes Hecktiefenruder) sondern auch vorne (Bugtiefenruder). Hier werden beide kombiniert eingesetzt. Die einzelnen Ruderstellungen gelten aber auch, wenn das Boot statt zweien nur ein Ruder hat - es wird dann eben nicht so schnell und nicht so stark reagieren wie mit zwei Rudern. Bild 2.3 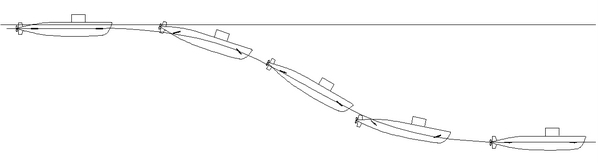 Ein Bugtiefenruder wirkt direkter und wird daher insbesondere bei niedrigen Geschwindigkeiten eingesetzt. Bei höheren Geschwindigkeiten lässt sich ein U-Boot auch nur mit dem Hecktiefenruder steuern. Da beim Abtauchen mittels Hecktiefenruder das Heck angehoben wird, kommt es leicht dazu, dass die Antriebsschraube durch Luftkontakt Schaum schlägt. Beim Abtauchen mit dem Bugtiefenruder geschieht dies nicht so leicht Eine andere Methode, dynamisch zu tauchen, wird gerne bei Kleinst-Modell-U-Booten angewendet. Man verwendet einen zusätzlichen senkrecht gestellten Antrieb bestehend aus Motor und Propeller. Mit reiner Motorkraft kann das Boot auf diese Weise auf- und abtauchen - je nachdem in welche Richtung der Motor den Propeller dreht. Da wir bei dieser Tauchmethode keine Tiefenruder benötigen, muss das Boot auch nicht in Bewegung sein und kann daher senkrecht wie ein Fahrstuhl auf- und abtauchen und sogar schweben, sofern sich die Motordrehzahl entsprechend fein einstellen lässt. Bild 2.4  Bei diesem Mini-U-Boot, dem MINI SHARK der Fa. Graupner, wird das Auf- und Abtauchen mittels eines senkrecht und mittig eingebauten Antriebs erreicht. Er befindet sich hinter dem Schutzgitter und kann vom Sender aus betätigt werden. Da das Boot mit Restauftrieb taucht, genügt es zum Auftauchen, den Motor einfach abzuschalten. Bild 2.5  Bei anderen Mini-U-Booten sorgen schräg nach unten gestellte Motoren für das dynamische Tauchen. Dadurch entfällt ein zusätzlicher Motor für die Vorwärtsfahrt, wie er bei Modellen mit einem senkrechten Tauchantrieb erforderlich ist. Die schräg gestellten Motoren sorgen für beides gleichzeitig, den Vortrieb und das Tauchen. Welches der beiden grundsätzlichen Tauchverfahren 'Statisch' oder 'Dynamisch' sicherer ist, darüber kann man lange diskutieren. Sicher ist hingegen, dass ein statisches Tauchsystem vor allem mehr Spaß macht. Wer bei diesem Hobby bleibt, der wird sich früher oder später dafür entscheiden. Die Haupvorteile sind: - Bessere Überwasser-Fahreigenschaften erzielbar durch die höhere Reserveverdrängung - Realistischeres Überwasser-Fahrbild möglich - Im Allgemeinen bessere Unterwasserfahreigenschaften Hauptnachteil: - Ein höherer technischer Aufwand (Tauchtank, Pumpe...) |
